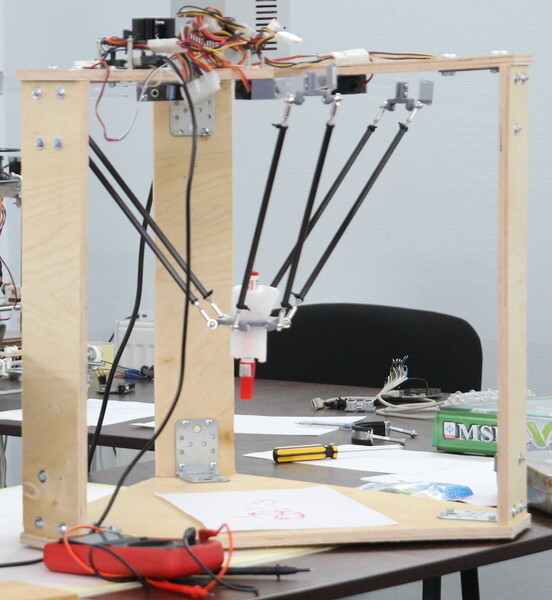
4. Ещё один дельта-робот.
Статус: убит
Конечное назначение — автоматизация тестирования.
Дельта-робот как манипулятор и шасси для датчиков и рабочих элементов
+ датчики касания, захваты и прочее
+ компьютерное зрение.
А вот в процессе уже выяснилось что сам по себе дельта-робот — уже достаточно интересная задача.
Дельта-робот как манипулятор и шасси для датчиков и рабочих элементов
+ датчики касания, захваты и прочее
+ компьютерное зрение.
А вот в процессе уже выяснилось что сам по себе дельта-робот — уже достаточно интересная задача.
Yet Another Delta Robot
Проект на GITHUB
Модель операционного пространства при максимальном отклонении рычага сервомашинки +- 45 градусов в обе стороны. Нарисована в SciLab
Некоторые детали напечатаны на 3D принтере. Для проектирования и экспорта моделей в STL формат (для печати) используется OpenSCAD
На видео в качестве контроллера используется отладочная плата STM32 value line Discovery
Использованные ресурсы
Участники проекта:
- a.parkalov@gmail.com
- gutikoff@gmail.com
- alexei.barchenko@gmail.com